スマート農業を加速!! 土壌の栄養状態を「見える化」
『施肥マップ』ソフトウェアリリース株式会社トプコン(本社:東京都板橋区、代表取締役社長:平野 聡)は、十勝農業試験場、北海道大学との連携により、基肥(もとひ)*1でも追肥(ついひ)*2でも場所ごとに散布量を変化させて施肥(せひ)を可能にする施肥設計ソフトウェア『施肥マップ』を発売いたします。
日本における農業の課題として、農業従事者の減少や高齢化が挙げられます。そこで近年、農林水産省ではロボット技術やICTを活用して超省力・高品質生産を実現する新しい農業、スマート農業の体系作りに取り組んでいます。当社ではこのスマート農業分野に向け、2009年に全地球航法衛星システム(GNSS)を活用したトラクターのガイダンスシステム、2014年には自動操舵システムを投入しました。さらには、2013年にレーザー式生育センサーCropSpec(クロップスペック)を開発、GNSSガイダンス/自動操舵システムと可変施肥機との組み合わせで、リアルタイムに生育状況の計測と追肥を行うシステムを開発しています。
生育センサーCropSpecを使って可変施肥による追肥を行い生育の均一化を目指しても、毎年何を植えても成長が良い場所と悪い場所とがありました。そこで、計測した作物の生育データから土壌の栄養状態(地力)を推測して、次年の育成計画、すなわち基肥の可変施肥に活用可能な施肥計画ソフトウェア『施肥マップ』を開発いたしました。 欧米では以前から施肥計画のソフトウェアを使用し可変施肥を行っておりますが、その多くは農業コンサルタント等プロ向けゆえ多機能であり、使いこなすには熟練を要するものでした。 『施肥マップ』は、農家自身が施肥判断を行う日本の状況を踏まえ、機能を絞りシンプルな操作性を実現した国産の施肥設計ソフトウェアです。
なお、『施肥マップ』は十勝農業試験場が研究している「畑輪作で活用できる生育履歴情報を利用したマップベース可変施肥技術」にて使用されているソフトウェアです。当研究は平成29年度の北海道農業試験会議にて【普及推進事項】*3として採択されました。
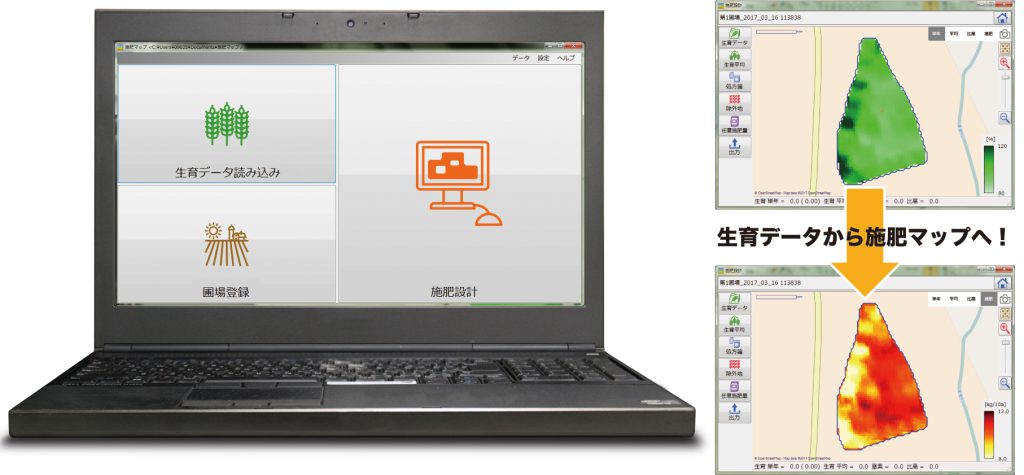
【施肥マップの主な特長】
■ 圃場(ほじょう)*4に最適な肥料散布を実現
生育センサーCropSpecや、衛星画像やドローンによるNDVI(正規化植生指数)などの生育データを使い、自動的に場所ごとに異なる施肥量を設定したマップを作成します。また生育データを使わずに、ユーザー自身で施肥量の設定も行えます。
GNSS自動操舵/ガイダンスシステム、可変施肥機と組み合わせることで、圃場に最適な肥料散布を可能にします。
生育状況や推定した土壌の栄養状態に合わせて場所ごとに施肥量を調整することで、以下の効果が期待できます。
- 作物の生育を均一にして品質の安定
- 作物の倒伏*5を減少することによる増収
- 施肥量の最適化による肥料コストの軽減
| *1 基肥(もとひ) | 種まきや苗植えを行う前に、農地へ肥料を散布すること。 |
|---|---|
| *2 追肥(ついひ) | 種まきや移植した後に、作物の生育途中に肥料を散布すること。 |
| *3 普及推進事項 | 地方独立行政法人北海道立総合研究機構では、道内の試験研究機関が実施した具体的試験研究成果を北海道農業試験会議成績会議で検討し、新たな技術・品種として普及指導することが有効なものを5つの区分で認定しています。「普及推進事項」とは、この5つの区分のうちの1つで、普及を推進すべき事項として認定された新たな技術を指します。 |
| *4 圃場(ほじょう) | :作物を栽培する田畑。 |
| *5 倒伏(とうふく) | 作物が生育中に倒れ伏してしまうこと。特に米や麦などでは、出穂後に倒伏すると稔実が悪くなり収量減してしまうほか、収穫作業も困難になってしまいます。 |
【その他】
| 発 売 時 期 | 2017年3月 |
|---|---|
| 国内標準価格(消費税込み) | オープン価格 |